








Description
Abstract:
The goal of Flying and Spy Robot project is to create a small, robust and highly maneuverable autonomous flying robot that can be used both indoors and outdoors under any weather conditions. Currently, similar platforms are controlled at low frequencies due to hardware and software limitations. This causes uncertainty in position control and unstable behavior during fast maneuvers. Our flying platform offers a 40 MHz control frequency and motor update rate, in combination with powerful brush-less DC motors in a light-weight package. Its robust performance is achieved by using simple but reliable highly optimized algorithms. The robot is small, light, and can carry payloads of up to 340g.
We believe that the key to achieving this goal is to build minimalist platforms that are light-weight and controllable at very high frequencies, (e.g. 40 MHz). Control at very high frequencies enables very fast response to changing environmental conditions such as strong, choppy winds, and also allows extreme acrobatic maneuvers. The challenges to achieving this kind of control are both on the hardware and the software front. From a hardware point of view we need light-weight low-cost Inertial Measurement Units (I MU) capable of fast responses.
From a software point of view, robust control algorithms that are tightly coupled to the hardware are needed.
. In this paper we describe a 1 rotor autonomous robot we developed in response to these challenges. One of the main design goals was to obtain a high controlling frequency of 40 MHz throughout the system. To support this, our platform features a custom built on board high-speed sensing system which consists of three gyroscopes to give relative measurements for the robot’s angles. High control frequency precludes the use of commercially available brush-less motor controllers, such as those found in model aircraft, as they only allow motor speed update rates of 40 MHz. We designed a new brush-less controller capable of a 40MHz update rate with an HTI2E interface. This controller has very low dead times and supports very dynamic movements. Intensive manual acrobatic flights with loops, flips, spins, sharp turns and combined maneuvers proofed the stability of the controller in extreme situations. Having such a high control frequency allows us to create an extremely stable platform, even with payloads of up to 340gm. Many applications for such a platform exist. The outstanding stability of the platform makes the integration of on board and off board position tracking system possible. At the end of this paper we demonstrate the performance of the system using an external motion tracking system to provide closed loop position control. Cameras mounted on the platform also benefit from a stable video on TV.
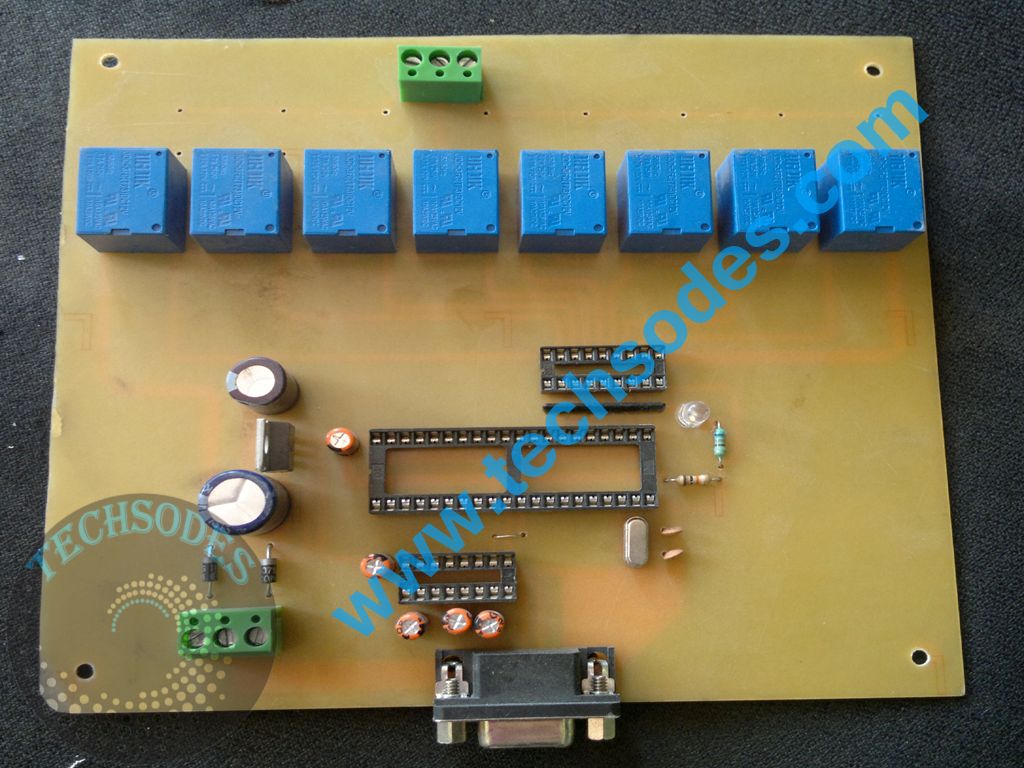
Working :
There is a micro – controller based circuit and window based software to control the Flying and Spy Robot for PC interface, which controls the Flying robot. The snap shot of this software is shown below. There is a circuit which is connected to the PC through RS 232 cable. This circuit has a MAX 232 IC which receives the data from PC and transfers it to the micro – controller AT89S52. The controller sends the signal to the ULN2003 IC (a relay driver IC) according to the command receive from PC. This relay driver IC operates the all 8 relays for transmitting the respected command to the Flying Robot. There is a receiver in the robot which receives that commands and move according to them. A camera is also attached with the flying robot to capture the video and transmit to the user for viewing.
There is window based software for PC interface, which controls the Flying robot. The snap shot of this software is shown below. There are separate buttons for left, right and landing in this window based software. User can increase or decrease the speed of the flying robot by using this software.
Advantages:
- Spying on people in ways people can’t move and from views humans can’t reach
- Giving us information that humans can’t get
- They can perform tasks faster than humans and much more consistently and accurately
- Low cost and reliable circuit
- They can entertain us and help us in certain tasks



Reviews
There are no reviews yet.